|
Amin Vahedian
Khezerlou |
Research |
|||||
|
Precise Bayes
Classification Algorithm*New The Bayes Optimal Classifier is shown to have minimal
classification error, given the true distribution of the predictors (citation
in the article). However, it is almost never the case that we have such a
knowledge. Methods such as Naive Bayes and Bayesian Network Classifier aim to
estimate the class posteriors by making certain assumptions. Naive Bayes
assumes that predictors are distributed with a certain form (usually normal)
and are independent of each other. These restrictive assumptions not only
reduce accuracy, but also negatively affect explainability. Bayesian Network
Classifier does not assume independence. However, it requires that we specify
pairwise dependencies beforehand. This task is never straightforward and can
quickly become prohibitive with growing dimensionality. In our work we make
no assumptions on dependency or distributional form. We define a new
formulation of the Bayes Optimal Classifier in discrete space. We propose a
novel classification algorithm called Precise Bayes to implement this new
formulation. In this method we directly estimate the class posteriors, given
the predictors, with almost no parameters to set and no restrictive
assumptions. Moreover, the predictions by Precise Bayes are fully
explainable. That is, every prediction is an empirical probability
calculation of every possible class, given the test point, and the class with
the highest probability is chosen as the predicted class.
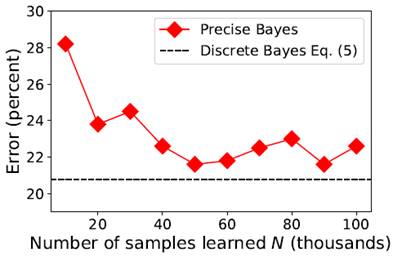
The above figure shows the error rate of Precise Bayes with
increasing number of training samples. This is the result of an experiment on
synthetic data. Since the distributions are known in this experiment, we can
calculate the theoretical minimal error in discrete space. This theoretical
minimal error is shown with a dashed line in the figure. The results show
that with increasing number of samples, the error rate of Precise Bayes
approaches the theoretical limit of classification error. In our recent paper
accepted to ICDM 2021 conference, we proposed a lemma proving that
Precise Bayes will approach this theoretical limit, and this experiment
confirms that proposition. Our argument is that, with more samples our
estimated empirical distributions will be closer to true distributions, thus
making our error rate be closer to the minimal error rate. One limitation of Precise Bayes is its reliance on large number
of samples. In some cases, Precise Bayes is unable to make predictions for a
test point, because the training set did not include a point that is similar
enough. Moreover, the memory usage of Precise Bayes grows with increasing
number of samples. Even though this growth is sub-linear, it still can create
problems. That is because to be more accurate we always need more and more
samples, and we cannot have the model grow to unlimited size. Future research
will address these issues by making design decisions that curb the memory
growth and reduce the need for large number of samples. Effects of
Traffic Congestion on Taxi Driver Work Motivation In this research, we validate
important management theories within a multidisciplinary collaboration to
uncover patterns of behavior by drivers after traffic congestion.
Specifically, how do taxi drivers perform (in terms of earnings) after
experiencing congestion for extended periods of time. We used a massive
dataset of taxi GPS records. In this work, our novel Bayesian model made it
possible to compare probability distributions of performance, instead of simple
linear analysis or comparison of point estimates.
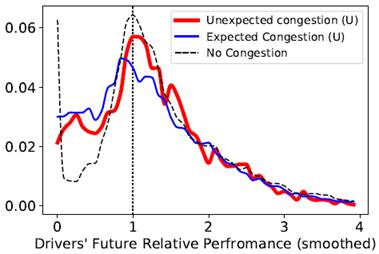
The above figure shows probability
distributions of taxi drivers' relative performance, following a traffic
congestion. Relative performance of 1 means they perform the same as their
own average. Numbers higher than 1 mean out-performance and numbers lower
than 1 mean under-performance. The analysis of these three distributions show
that drivers under-perform themselves after experiencing traffic congestion.
Our collaborators used the result of this analysis to examine the validity of
work motivation theories. An article on this research will be submitted to
the Information Systems Research (ISR) journal. Predicting
Urban Dispersal Events A dispersal event is the process
of an unusually large number of moving objects leaving the same area within a
short period of time. Early prediction of dispersal events is important in
mitigating congestion and safety risks and making better dispatching
decisions for taxi and ride-sharing fleets. Literature of dispersal event
prediction solves this problem as a taxi demand prediction problem. It is
shown that taxi demand is highly predictable (see article for
citation). However, dispersal events are by definition violations of this
predictable pattern. Thus, existing methods fail to give accurate predictions
of demand in case of dispersal events. There are two main questions in this
study: (1) Will there be a dispersal event in the future? If so, (2) what is
the demand during the dispersal event? To answer these questions, we
proposed a two-step framework by formulating the Dispersal
event prediction problem as a Survival Analysis problem. We
call this framework DILSA+. The proposed framework is capable of predicting the
occurrence and start time of dispersal events in addition to the abnormal
demand in case of such an event. In our formulation, the occurrence of
dispersal event is treated as the death event in conventional survival
analysis. This formulation uses deep artificial neural networks to estimate
the survival function for a target period in the future. Using DILSA+, future
dispersal events are predicted with recall of 0.53 and precision of 0.88.
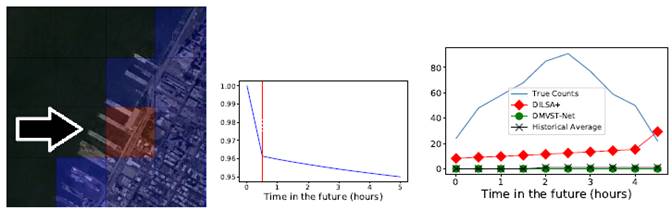
The above figure shows an example
of a real-world dispersal event predicted by DILSA on March 19, 2016 at Pier
92/94 in Manhattan as a result of a home design exhibition. The second figure
shows the survival function during the prediction target period. The vertical
line shows the predicted start time of the dispersal anomaly. The third
figure shows the predicted pickup counts during the dispersal event. The
figure shows that DILSA+ predicts the unexpected high demand, while the
baseline DMVST-Net (see article for
citation) stays close to the historical average. This work has been published
in ACM Transactions on Intelligent Systems and Technology (TIST), after
an earlier version was published in the proceedings of the AAAI 2019
conference. Predicting
Urban Gathering Events We used destination prediction of
GPS trajectories to forecast gathering events. Destination prediction is
challenging due to complex dependencies among the segments of each
trajectory. This challenge has been addressed in the literature by modeling
the trajectory as transitions between locations, which are treated as
Markovian states (see article for
citation). Formulating the trajectory as a Markov process enforces the
inherent assumption of independence from the past. In the context of an urban
trip, this assumption is severely limiting, because future locations of a
traveler strongly depend on its past locations. We relax this limiting
assumption and address the resulting computational challenge by proposing a
state-of-the-art destination prediction model called Via Location Grouping
(VIGO) that efficiently produces destination probabilities for incomplete
trajectories. VIGO is a creative implementation of Bayes Optimal Classifier
that is designed to specifically work for this problem.
Even by using an accurate
destination predictor, it is challenging to forecast unexpected gatherings.
Because, learning historical patterns of trajectories cannot reliably
forecast rare gathering events, as they violate regular patterns by behaving
abnormally. To address this challenge, we proposed a Dynamic Hybrid
framework, called DH-VIGO, that takes advantage of two VIGO models. This
framework is capable of identifying and learning emerging patterns of
abnormality in the trajectories, as well as historical patterns. DH-VIGO
dynamically decides which pattern (historical vs. recent abnormality) should
be used to predict the destination of each incomplete trip. DH-VIGO makes it
possible to forecast rare and unexpected gathering events, by pinpointing to
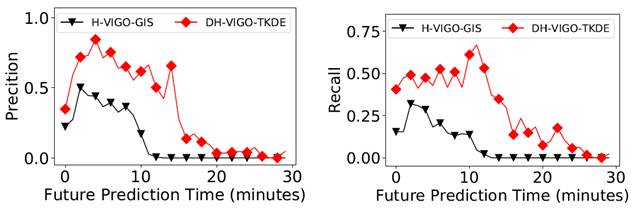
the scarce and not-immediately-obvious evidence that exists at current time. The
above figure shows the prediction performance of DH-VIGO in forecasting
gathering events in future time-steps compared to a baseline we developed specific
for this work. This work was published in IEEE Transactions in Data and
Knowledge Engineering (TKDE), after an earlier version was published
in the proceedings of ACM SIGSPATIAL conference. |
|
|||||
|
||||||
|
||||||